





Holybro PX4FLOW Optical Flow Smart Camera Sonar Kit
£127.90 Inc. VAT
This unit incorporates Optical Flow Smart Camera and Sonar Sensors.
Out of stock
This product is currently sold out.
No worries! Enter your email, and we'll let you know as soon as it's back in stock.
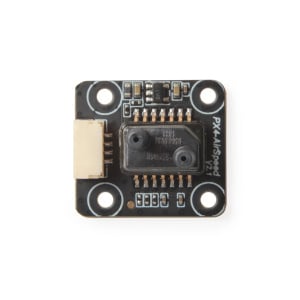
The PX4FLOW Sensor utilises a specialised high resolution downward pointing camera, known as an Optical Flow Smart Camera to track ground velocity, along with a Sonar Sensor to measure distance. These two sensors together can provide Autpilots such as the Pixhawk 4 with the ability to position lock when no GPS signal is available, for example indoors. It can also be used in conjunction with the GPS data to provide a more accurate position lock. The sonar sensor can be used to provide a terrain tracking capability.
The Flow Kit has a native resolution of 752×480 pixels and calculates optical flow on a 4x binned and cropped area at 250 Hz (bright, outdoors), giving it a very high light sensitive. It also works indoors and in low outdoor light conditions without the need for an illumination LED (at 120 Hz (dark, indoors). The other great feature of this sensor is that it can be re-programmed to do any other low level computer vision tasks using the 752×480 pixel camera and the 168Mhz Cortex M4F CPU.
Features:
- MT9V034 machine vision CMOS sensor with global shutter
- Optical flow processing at 4×4 binned image at 120 (indoor) to 250 Hz (outdoor)
- Superior light sensitivity with 24×24 um super-pixels
- Onboard 16bit gyroscope up to 2000°/s and 780 Hz update rate, default high precision-mode at 500°/s
- Onboard sonar input and mount for Maxbotix sonar sensors. PX4 Flow comes with the sonar already mounted and installed. MB1043
- USB bootloader
- USB serial up to 921600 baud (including live camera view with QGroundControl)
- USB power option
Please Note: The PX4FLOW is supported from Copter 3.3 and higher. It is not yet supported in Plane or Rover.
Support: Ardupilot Wiki / Dronecode
- Weight: 17g (without cables)
Included:
- 1x PX4FLOW Board
- 1x HRLV-Massonar MB1043
- 1x 6pin to 6pin 1.25mm connection leads
Questions and answers of the customers
There are no questions yet. Be the first to ask a question about this product.
SHIPPING & DELIVERY
We are based in the UK and ship to most destinations worldwide.
We dispatch orders during the times shown on our Dispatch Schedule. Orders placed before the daily dispatch cutoff will ship the same day (subject to stock availability). Orders placed after the cutoff will ship on the next scheduled dispatch day.
A confirmation email is sent once your order has been packed. If you need to amend your order, please contact us as soon as possible — once shipped, we’re unable to make changes.
We work with trusted delivery partners including Royal Mail, DHL, UPS, Fedex and Parcelforce. If you have a delivery requirement or would like to arrange collection, please get in touch.




Next Dispatch: Tomorrow
Please fill in the fields below with the shipping destination details in order to calculate the shipping cost.
Shipping to the UK
- Order before the daily dispatch cutoff for same day dispatch.
- FREE delivery available on qualifying orders over £99 (under 1kg).
For small, low-value orders, Royal Mail First Class is our most economical option. Royal Mail Tracked 24 is the most popular choice, offering full tracking and flexible delivery options. For guaranteed next working day delivery, we recommend Royal Mail Special Delivery.
Royal Mail delivers to residential addresses Monday to Saturday, while courier services (including DHL) typically deliver Monday to Friday.
International Postage
- USA orders: Import duties and taxes are prepaid by us — no additional customs charges on delivery.
- Other destinations: Customs duties or import taxes may apply and are the responsibility of the recipient.
Smaller, lower-value orders may be sent via Airmail or tracked postal services. Economy road and express air courier options are available depending on destination. For faster delivery, we recommend express air courier services such as DHL Express, which typically deliver within 1–2 working days across Europe and a few working days for most other destinations.
You may also like…




Related products





































Reviews
Clear filtersThere are no reviews yet.