




Matek CRSF To 10CH PWM Converter (CRSF-PWM-C)
£12.90 Inc. VAT
This PCB converts from CRSF Protocol to PWM, providing 10 channels. It also includes an on board 90A current sensor.
Only 5 left in stock|Next shipping: 20/07/2026
 1")
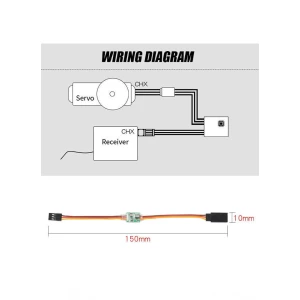
This product will be useful for people requiring PWM outputs from their ExpressLRS or Crossfire radio receiver. It converts from CRSF, which is the protocol used by ExpressLRS and Crossfire receivers, to PWM outputs which is the signal used to drive servos and ESCs. This particular breakout board provides 10 PWM connections and PWM output frequency can be adjusted for faster servos (50Hz default) – Matek also make a 6-channel version. In addition to the PWM connections, the board has an onboard 90A current sensor input, and the values are included in the CRSF telemetry and sent to the connected transmitter. There are also 2x uarts to allow for connection of a GPS receiver (NMEA output), which then transmits the coordinates along with the Crossfire Telemetry. The board is compatible with up to 36v input, but please note this doesn’t power the servo rail, instead you should power from an external source e.g. a 5v ESC UBEC or external voltage regulator.
Please note, this listing is just for the converter and doesn’t include a receiver as pictured in the images below.
 2")
 3")
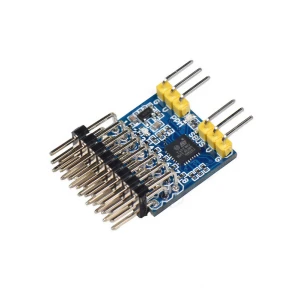
Pinouts and Pads
- Tx1/Rx1(UART1) for CRSF protocol Receiver
- Tx2/Rx2(UART2) for GPS/firmware update/setting parameters
- 1~10: CH1~CH10 PWM outputs
- Curr: current sensor signal (0~3.3V)
- Vbat: Battery voltage sensing (0~36V)
- G: ground
- 4v5 pad voltage = 5V pad voltage -0.3V, make sure the voltage on 5V pad is not higher than receiver and GPS rated voltage.
Failsafe
- Failsafe value is set automatically after CRSF-PWM board is powered on and receive CRSF signal. LED blinks 8 times quickly.
- Failsafe value = The PWM value of each channel(except CH3) when CRSF signal is received by CRSF-PWM board for the first time
- CH3 is specially arranged for the throttle, Failsafe value = 988 by default.
- Usually put the Throttle joystick to the lowest point, put AIL(Roll), ELE(Pitch), RUD(Yaw) middle before powering on receiver.
LED status
- slow blinks: CRSF-PWM board doesn’t receive CRSF signal, e.g., receiver is not bound with transmitter, receiver is not connected to UART1 of CRSF-PWM board.
- 8x quick blinks: CRSF-PWM board received CRSF signal and failsafe value is saved.
- solid ON: CRSF-PWM board and receiver are working normally
- 2x slow blinks between 8x fast blink and solid on: CLI mode is active
GPS telemetry
- Compatible with GPS NMEA protocol, 1Hz, Baud 9600~115200
- GPS “TX” to CRSF-PWM board “RX” Single wire half duplex UART connection, CRSF-PWM board “TX” to GPS “RX” is not essential.
- Support GPS Telemetry ID: GPS, GSpd, Hdg, Alt, Sats
- u-blox series GPS can output “0+1 – UBX+NMEA” protocol by default
- Sensors(GPS, GSpd, Hdg, Alt, Sats) will blink in Transmitter TELEMETRY tab once CRSF-PWM board has connection with GPS.
- Troubleshooting for no GPS telemetry, double check the wiring between GPS and CRSF-PWM board, some u-blox GPS may don’t output NMEA protcol, you need to be reverted GPS to default configuration in u-center.
- with OpenTX Telemetry Logging, You can plot your flight path or search the lost plane.
TIM & PWM Frequency
- PWM frequency on all 10x Channels can be configured according to TIM
- PWM run at 50Hz by default
- TIM2: CH1, CH2, CH4
- TIM16: CH3
- TIM3: CH5, CH6, CH7, CH8
- TIM1: CH9, CH10
CLI mode
- If CRSF-PWM board doesn’t detect GPS connected to UART2 within 10 seconds after powering on, CLI mode will active.
- After CLI mode is active, CRSF-PWM board can be connected to configurator via USB-TTL module/FC passthrough.
- in CLI mode, CRSF-PWM board firmware can be updated
- CLI mode has no effect to receiver CRSF signal and PWM outputs
- Compatible with CRSF protocol receiver only
- 10x PWM outputs
- PWM frequency configurable (50Hz default, 100,160,330, 400Hz)
- 2x UARTs (for Receiver and GPS)
- Telemetry ID: RxBt, Curr, Capa, Bat%, GPS, GSpd, Hdg, Alt, Sats
- 36V Max. battery voltage sense (1K:10K voltage divider built-in)
- Current sensor built-in (90A continuous /220A Peak), current scale = 150 by default
- Vbat and Current sensor scale configurable
- Failsafe value auto set
- Firmware upgradeable
- Rated voltage: 4~9V @5V pad, 0~36V @BAT+
- No 5V regulator built-in
- 26mm x 26mm, 2.8g
Included:
- 1x CRSF-PWM-C
- 1x low ESR capacitor
- Dupont 2.54 pins
Questions and answers of the customers
There are no questions yet. Be the first to ask a question about this product.
SHIPPING & DELIVERY
We are based in the UK and ship to most destinations worldwide.
We dispatch orders during the times shown on our Dispatch Schedule. Orders placed before the daily dispatch cutoff will ship the same day (subject to stock availability). Orders placed after the cutoff will ship on the next scheduled dispatch day.
A confirmation email is sent once your order has been packed. If you need to amend your order, please contact us as soon as possible — once shipped, we’re unable to make changes.
We work with trusted delivery partners including Royal Mail, DHL, UPS, Fedex and Parcelforce. If you have a delivery requirement or would like to arrange collection, please get in touch.




Next Dispatch: Mon 20 Jul
Please fill in the fields below with the shipping destination details in order to calculate the shipping cost.
Shipping to the UK
- Order before the daily dispatch cutoff for same day dispatch.
- FREE delivery available on qualifying orders over £99 (under 1kg).
For small, low-value orders, Royal Mail First Class is our most economical option. Royal Mail Tracked 24 is the most popular choice, offering full tracking and flexible delivery options. For guaranteed next working day delivery, we recommend Royal Mail Special Delivery.
Royal Mail delivers to residential addresses Monday to Saturday, while courier services (including DHL) typically deliver Monday to Friday.
International Postage
- USA orders: Import duties and taxes are prepaid by us — no additional customs charges on delivery.
- Other destinations: Customs duties or import taxes may apply and are the responsibility of the recipient.
Smaller, lower-value orders may be sent via Airmail or tracked postal services. Economy road and express air courier options are available depending on destination. For faster delivery, we recommend express air courier services such as DHL Express, which typically deliver within 1–2 working days across Europe and a few working days for most other destinations.
Related products

































Reviews
Clear filtersThere are no reviews yet.